09222012
昔々、猫又も若かりし頃....ガンダムが好きで、アムロがコンピュータを組むシーン(顕微鏡を覗きながらやってるヤツね)等を羨望のまなざしで見ていた頃がありました。
一念発起した猫又はラジコンハロを作る事を決意....その当時の記録です。文章等も昔のままで掲載します。ご笑覧ください。
ハロを作るぜ!---HARO Project---
はじめに....
とある日、雑貨屋さんを散策していると、何やら緑色の丸いものが転がっていました.....そう、お気づきのヒトは既にいらっしゃるでしょう。あのハロです。
ガンダムといえばハロ!(おいおい^^;;)、私もガンダム世代ですが、他の人たちと違った見方をしていました...そう、お察しの通り、『いつか、ハロを作ってみたい....』
その後、何度かトライしようとしましたが、何せ、外観の美しさ(丸さ??)を再現できないために何度挫折したことか...外観が美しくなくては作る意味がなーいぃぃぃぃ><;;
ところが、ガンブラが再燃する昨今、お店にバンダイさんからハロのごみ箱が売っているではないですかぁ(咆哮!!...バンダイさんの商魂には頭が下がります。すでに小さくて動くハロも井上遥さんの声付きで売ってるし^^;;もちろん1個所有しております^^;;)。
これを活用しない手はない!!!メカ好き、アニメ好き、猫の手隊1号ファンの皆様(いるのかなぁ^^;;)、お待たせしました。このページではなんと、オリジナルの動くハロを作ってみます。
仕様策定
開発に当たり幾つかの段階的な仕様を想定しました。
ハロといえばコロコロと転がって移動するのが当然(^^;;)なのですが、強度等幾つかの克服すべき問題もありますので....段階的に機能拡張を行う方針で開発を行います。
1:とりあえず、お耳パタパタ、タイヤの足で自走する(零号機と命名)
2:他の仕様は今のところ秘密^o^(初号機、弐号機まで開発する予定)、すっごいの作る予定です。
スポンサー求む!開発資金が底を尽きそう.....バンダイさんがスポンサーになってくれないかなぁ^^;;奇特な方、バンダイ様、メール下さい^^;;
3:初号機、ついにそのベールを脱ぐ!^o^ ご覧下さい。10/21/2003
ハロを作るぜ!---零号機の開発---
ハロの入れ物を買い込んで構想数週間、いよいよ開発開始!!
耳(?)の開閉は当然行われなければなりません^o^
と、いうことで(笑)、ラジコンで使用するサーボモータとリンケージを用いて構成することにしました(芸は身をタスク^^;;....TASK or 助く??)。
サーボはPIC16F84Aで20ms周期で割り込みをかけて制御を行います。とりあえずデモとして左耳-右耳-両耳と順番にパタパタとフリップ(上下運動)するデモプログラムにより動作を確認しております。
#プログラム、回路図等は御要望が多ければ公開する用意はあります(6/11/2003)....プログラム等は現存しますが公開拒否です(09222012現在)
耳は最初からくりぬかれていたのですが、下半身(?)は穴が開いていません。コロコロと転がる動作をするのであればそのままでもいいのですが、とりあえずタイヤを使って地面をはいずる仕様にすることにします。
そこで、気合いを入れて○穴を開けることにします。慎重な作業と、丁寧なやすりがけ(^^;;)により、無事に加工を完了しました。ホーザンの消しゴム型ヤスリが大変重宝しました。(6/16/2003)
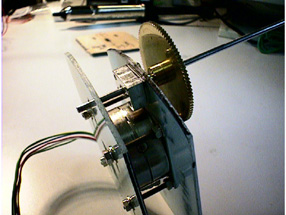
次に作成しなければいけないのは駆動部になります。駆動用モータは世の中にごまんとありますが、今回は位置関係の制御が楽でオーソドックスなステッピングモータを使用する事にします。それにしてもこのサイズのギアボックスは市販されていないため、FRP(2mm)を削りだして作成しました(実際のところ、ハロは丸いため曲面を合わせるのに苦労します)。
ギアの受軸は今回は入手の容易性等を考慮して3mmにしました(本当はもう少し太いものを使いたかったのですが、まあ、零号機ということで『あたり』だしです^^;;)。
#ギアの歯数、モータの仕様等は御要望が多ければ公開する用意はあります。(6/17/2003)......資料等は現存しますが公開拒否です(09222012現在)
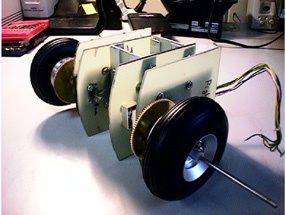
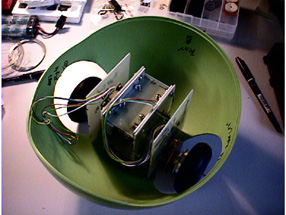
先ほど示したギアボックスを左右1個ずつ作成し、L型ステンレスアングルとFRPの切り出し片で連結したギアボックスです。僅かにハの字になるようにワッシャをかまして角度をつけています。
タイヤにはラジコン飛行機用のタイヤを使用しました。この部分の構造決定にかなり時間をとられました。(6/23/2003)
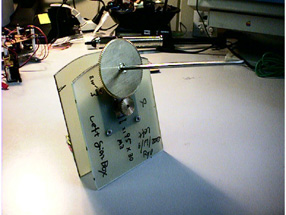
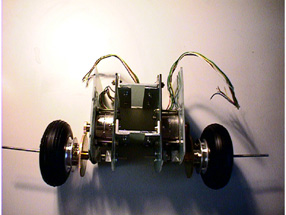
前回製作したギアボックスをハロの下半身に固定しました。固定には6mm×60mmのネジを2本使用し、途中にFRP削りだしによる固定用アッセンブリをかましています。後ろ側に自在キャスタをつけることで3本足のハロになりました。重心は少し後部に設定することで安定感を出しています。

上半身をかぶせた状態です。少し上目遣い的表情になります^^;;(媚びている訳ではありませんが)。
駆動回路&制御プログラム製作はまだまだこれからですが、とりあえず、『ハロ、大地に立つ!』(おそまつっ^o^ 6/30/2003)
色々あったハロ零号機開発....最終的に幾つかの重要な課題を見出すことができました。これらを教訓にして初号機へとハロは進化していきます^o^。
しばらくは内蔵するプログラムや制御システム、操作環境の考察と試作に入りますので、一端ここで休憩にします。
ついに、ファーストステージ終了。全てはセカンドステージへ続きます^o^(しばらく、間があく予定です。お楽しみに.....7/2/2003)
ハロを作るぜ!---初号機の開発---
零号機の問題点を克服し(?)、いよいよ完成!!
皆様、御無沙汰いたしております。猫の手隊1号です。
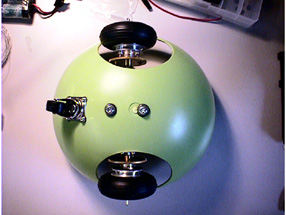
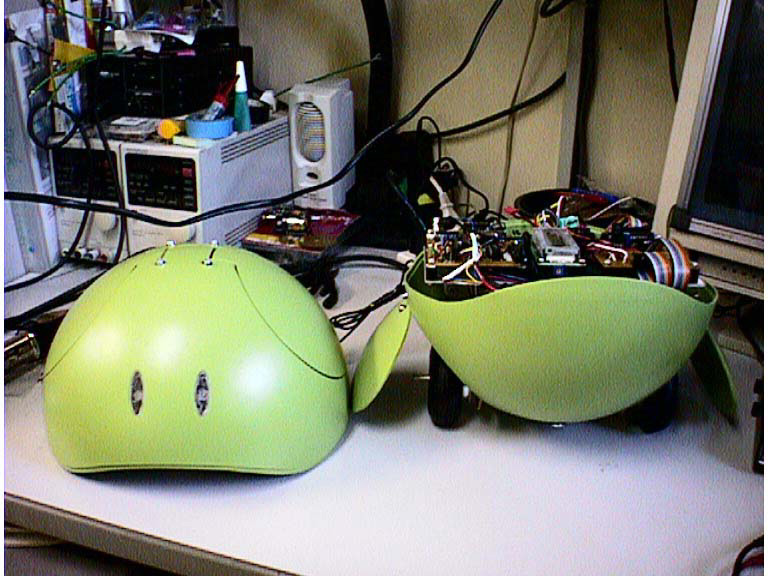
ハロ零号機の開発から幾星霜、いよいよ初号機のお披露目と相成りました。まずは、初号機の勇姿をご覧下さい!^o^
え?零号機と何が違うのか?.....???....まぁ外見は同じものを使用しているので見栄え的にはほとんど変わりませんが^o^、今度のハロはなんとラジコン制御ができるのです!!!
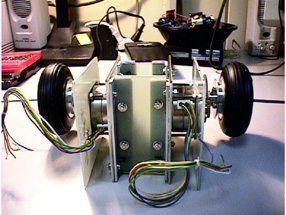
それでは、中身をお見せいたしましょう。下の写真は頭部と下半身を分離したものです。
零号機をご覧いただくとわかりますが、前のバージョンに比べてずいぶんと回路が複雑になっています。重量もずいぶんと増えて、その分成長したと言うことでしょうか^^;;
ハロを作るぜ!---初号機の開発---
開発コンセプト
ハロ初号機の最大の問題点.....それは、単にお耳パタパタ、単にその辺を徘徊するだけの存在でした。つまり、人間に制御されることもなく、また、自律的に判断し、行動を起こす、いわゆるロボットでもありませんでした...^^;;....文字通り、プロトタイプだったのです。
そこで、今回は(予算の関係が大きいのですが...)人間による動作制御を可能とすることを第一目的としました。最終的に行き着いた制御法は....ラジコン制御でした(自立判断式を期待された方にはごめんなさい^^;;....もうお金がありません....><;;)。
とはいっても、普通のラジコン制御ではせいぜい、スピコンにサーボ制御....そこでラジコン受信機(市販品)の信号を解析し、各チャネル毎のデータをリアルタイム制御のキーコードとして使用することにしました。
開発に当たり、今回のハロは各機能ブロックを4つに区分して設定しました。すなわち、
UNIT 1:ラジコン受信信号 解析・変換部(CPU1)
UNIT 2:耳フリップ(サーボモータ、割り込み処理)制御部(CPU2)
UNIT 3:音楽(初代ガンダムのテーマ)制御部(CPU3)
UNIT 4:足(ステッピングモータによるタイヤ回転)制御部(CPU4)
のように区分し、各ユニットごとにCPUをもたせ、1担当のCPUが2,3,4のCPUに命令し、その命令に応じて2,3、4は個別に制御を行うという、疑似マルチCPU構造にしました。無論、CPU1から命令が来ない間は、各CPUは独自に処理を続けています。
#要は疑似分散処理がPICによりどこまでできるかを試したかったのです^^;;.......まぁ専門的に言うと分散処理というにははなはだおこがましいのですが、各ユニット毎のプログラム更新は各ユニットの範囲で行え、全体に影響を及ぼさないという概念をテストしてみたかったのです。
ハロを作るぜ!---初号機の開発---
ハロ頭部 格納回路関連情報
ハロの頭部には零号機とほぼ同等のサーボモータリンケージ機構が組み込まれています(写真は零号機のページを御参照下さい)。
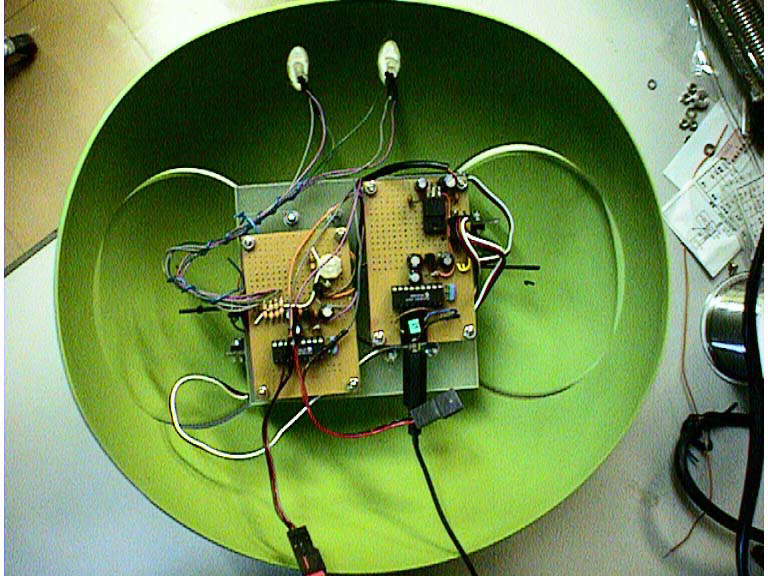
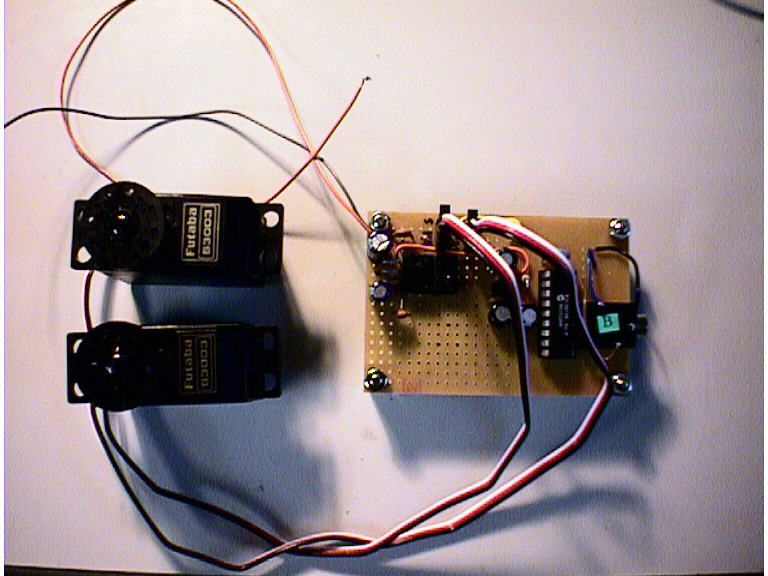
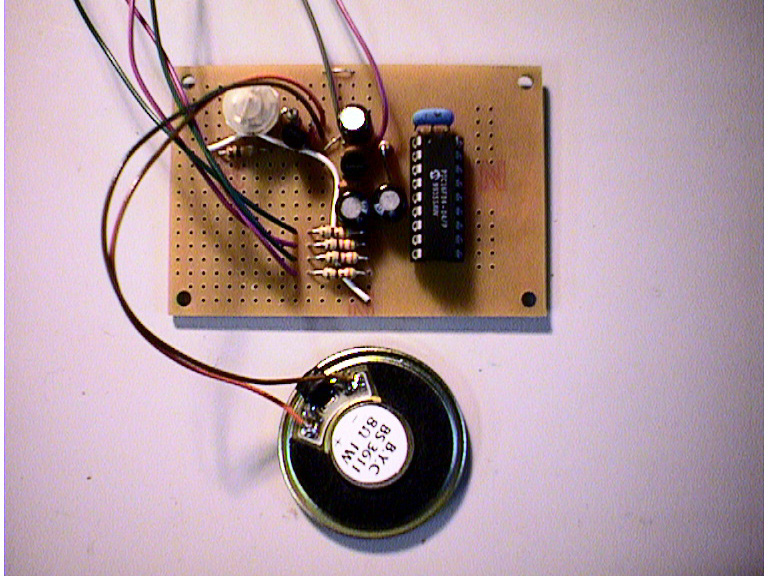
零号機と異なるのは、サーボモータ(耳?の開閉制御CPU)がメインCPUの管理を受けるように、ソフト・ハード的に拡張されている点にあります。下図上がサーボモータ制御部、下側が音楽発生部です(眼の代わりに3色LEDを装備し、音楽に合わせて色が変化します)。
メインCPUとの通信はシリアルプロトコルで行います。また、サーボモータは御多分に漏れず14ms周期の割り込み制御より実現しています(零号機のサーボモーターと違うのがお分かりになりますか?_?)。
具体的な操作法としては、ラジコンプロポのアイドルスイッチとGyro感度を併用し、idleがNormalの場合は、耳のフリップ動作無し、idle1の場合は両耳がゆっくりフリップ、idle2の場合は、Gyro感度設定数値により右耳のみ、または左耳のみのフリップ、あるいは左右の高速フリップと動作状態を変更できるようにしています。
また、各ユニットの電源ライン、制御ラインはラジコン用コネクタを使用しているため、基板単位での脱着は容易です。
ハロを作るぜ!---初号機の開発---
ハロ下半身 格納回路 関連情報
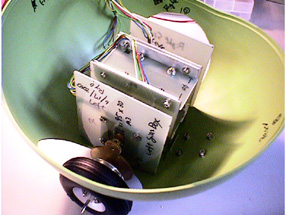
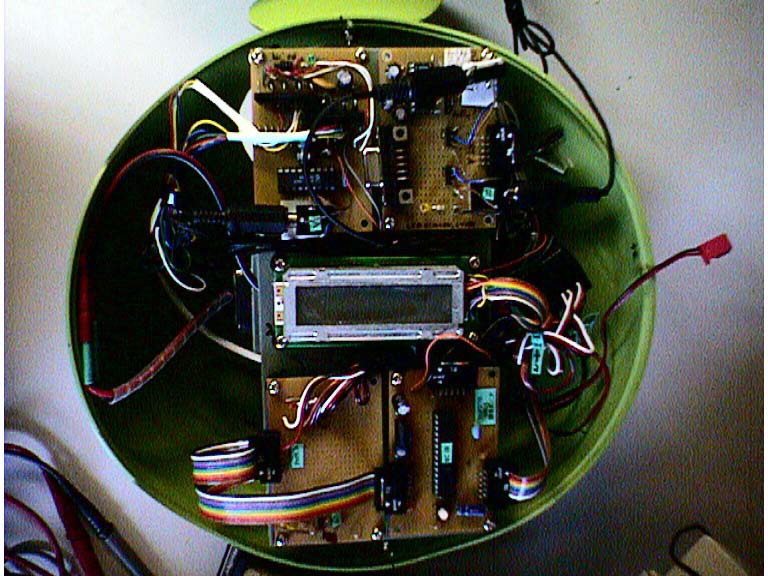
こちらが、先ほどお見せしたハロの下半身です。
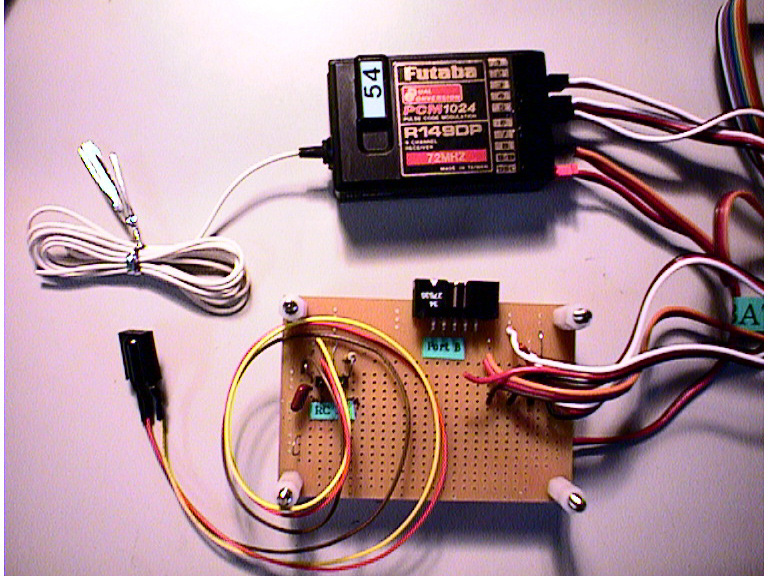
下の写真が、FUTABA製の受信ユニットとIrDA(赤外線)受信ユニットの回路基板です。当初、どちらでも制御できる(つまり、ラジコンプロポでも、その辺に転がっているリモコンでも)様にしていたのですが、気力の減退にともない^^;;、とりあえずプロポ版のみ、作り込みました。(もちろん、赤外リモコンだけでもとりあえずの動作は行えます。)
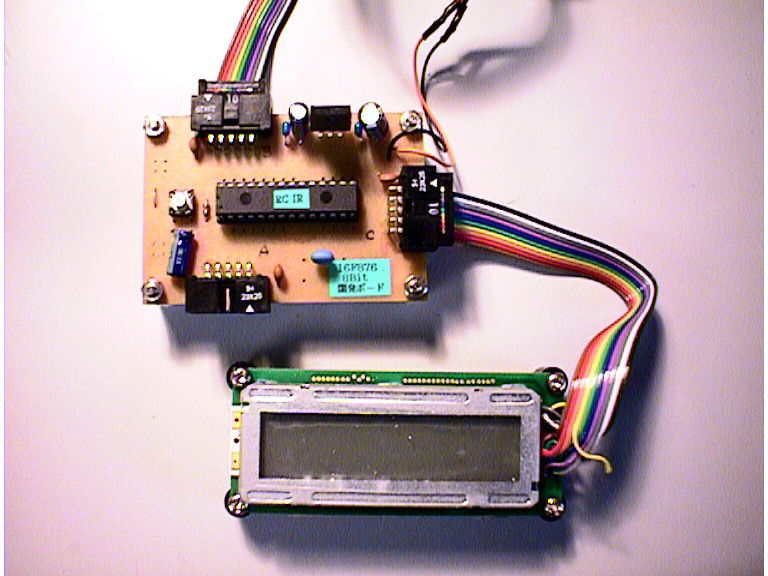
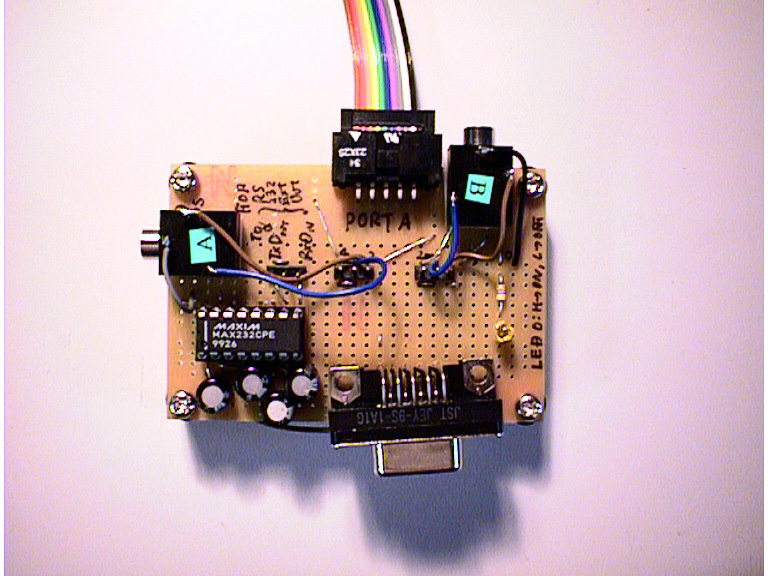
下の写真がUNIT1,すなわり本ハロシステムの中枢システムになります。ここでは、RC信号を解析し、液晶モニタに表示するとともに、各ユニットへ制御データを送ります。ここでは、PIC16F876(20MHz)を使用しています。
下の写真はデータセパレータと呼んでいますが、UNIT1にスペースが無いために増設したもので、基本的にはコネクタを物理的に載せる所です。各種検証用にパソコン用RS232C(DB9)コネクタも装備しています。実はこの基板は全てプロト品で、組み直せばもう少しシンプルになるのでしょうが、これについても気力が途絶えました...^^;;、試作基板をそのまま組み込んでいます....ふぅ...
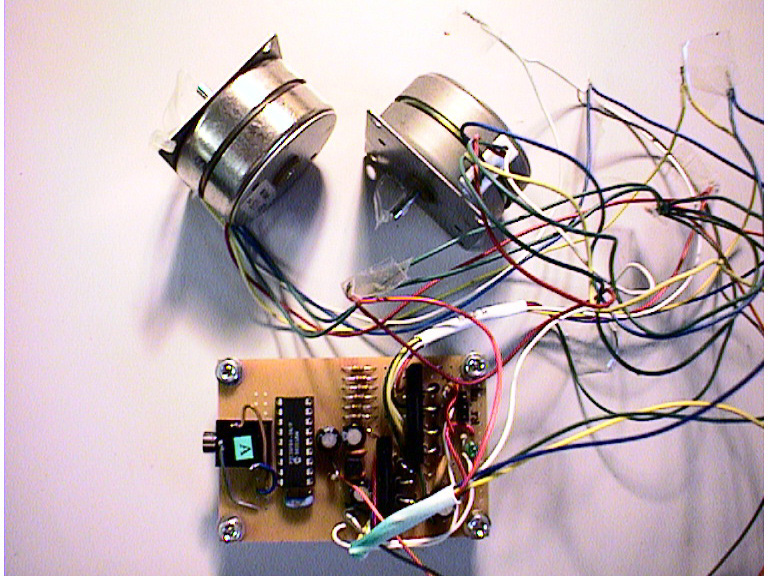
下はステッピングモータ制御回路とモーターです。モーターは1個¥500前後の中古モータ(金がなーぃ...><;;)で構成しているため、初号機の自重(そのうち計ります...)を動かすのにぎりぎりでした.....もう少しトルクフルなモーターが買えればよかったのですが.....
ハロを作るぜ!---初号機の開発---
{総評.....っていうか、感想ですねぇ.....自己反省も含めて.....
}
零号機を作り初めてはや4ヶ月...しばらく時間は空きましたが、ようやく初号機の完成に至りました。実際のところ構想は7月(2003年)末には完了しており、各ユニットのテスト・試作も8月中旬には完了していました。
それからこれまでの間に色々と雑用が増え、自分の時間がとれにくい状態が続いております><;;.....
本来であれば、赤外線・あるいは超音波関連のセンサの搭載や、CPLDを中核とする制御環境を構成し、自立判断・走行型ハロを作りたかったのですが、予算・諸般の事情によりもう少し先延ばしになりそうです。(弐号機に期待して下さい.....あるかどうか、不明ですが...><;;)
零号機試作で確認したギアボックスのシャフト強度不足も4mmに強化・改善し、サーボモーター固定台もFRPで強化したものの、別の問題が幾つか生じる結果となりました.....中でも最大の問題は、”ハロの足が遅い!”ということでしょう.... 重量はまだ計測していませんが、意外に重いハロ(零号機の倍は重いと感じます)....これを駆動するのに使用しているのは、中古で¥500程度の、規格不明のステッピングモーター....切なくなります....><;;(貧乏はきらいやー{{><}} )
実際のところ、ラジコンヘリ等で使うモーターを採用しようかとも考えましたが(無論、既に最大60A程度まではOKのスピコンも試作完了済みです^o^v)、下手をすると(ウチの娘が操縦すると)、一撃で壁に激突し、”どっかーん!”と言うことも予測できるので(それに、ハロボディが強度的にもたない気もしているのです)やめにしました^^;;。基本的には”癒し系”ということで....
実は、このプロジェクトの真意は、単にハロを作るだけではなく、本業で必要な幾つかの考え方を実証することにありました。その結果、今後の研究開発に十分な情報を獲得することができました(一見すると、私の本業とは全く関係が無いように見えるため、私に対して誤解を持たれた方もいるようですが^^;;...まぁ、それはそれでよしとします。いちいち説明しても仕方ないし、理解できない輩も多いみたいだし.....私のもつ技術も一朝一端でできているわけではないのですよ.....実際.....派手な面ばかり求める人たちには疲れます...)。おーっと、愚痴っぽくなりましたねぇ..^o^;;
このハロの結果を基に、しばらく本業に専念する予定です。もし、資金がたまったら(スポンサーさんがついたら嬉しいなぁ.....バンダイさんからのメールは来ておりません^^;;((10/21/2003現在)、どなたか資金協力して下さる方、メール下さい。)、次は自立・判断型を作りましょう。ではまた、その日まで。See you!
最終更新:2012年09月22日 12:21